I design mechanisms, machine them, and put them to the test.
I'm a mechanical engineer at Columbia (Class of 2028) working at the intersection of rehabilitation robotics and precision manufacturing. Right now I'm researching soccer-header biomechanics in the ROAR Lab, leading the University wide Robotics Club, and working at the Columbia Makerspace.
Selected Work
06 PROJECTS · TAP DETAILS TO FLIP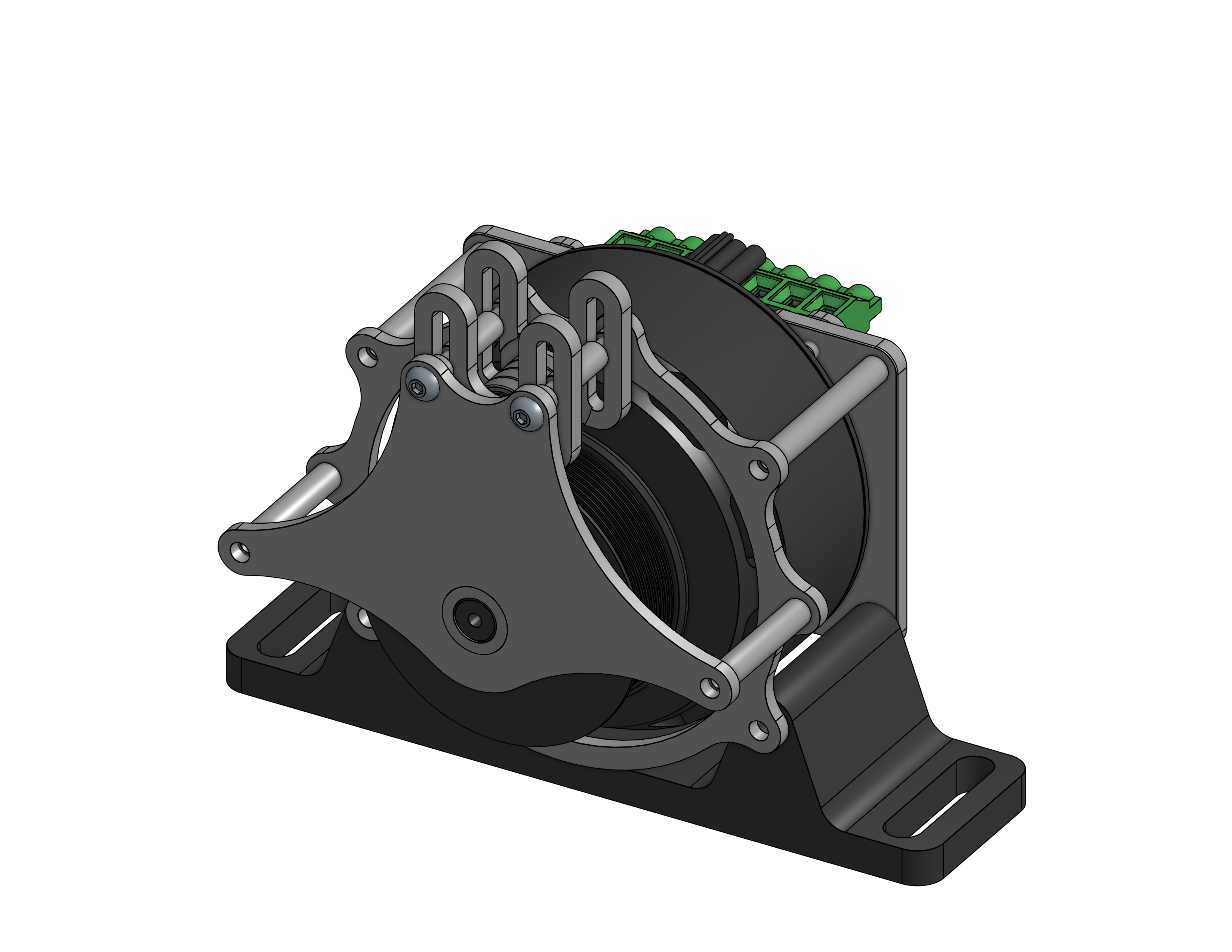
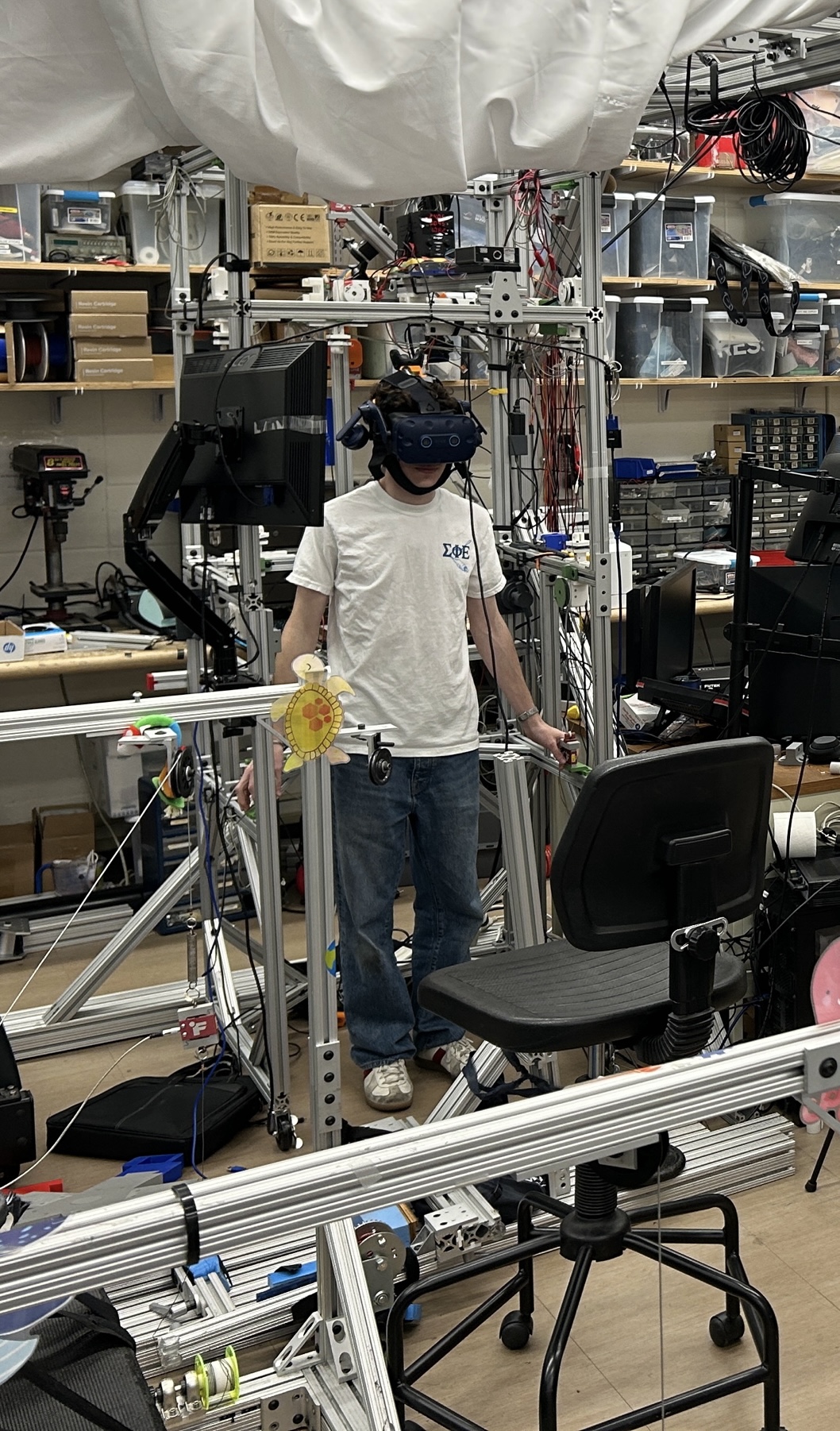
Soccer Header Robot
Reproducing the forces of real soccer headers to study — and reduce — the risk of brain injury. Built in Columbia's ROAR Lab.
Inside the build
A two-phase platform: (1) header categorization using a custom ball-dropper mechanism for repeatable, controlled impacts, and (2) VR neck-training driven by a 7-motor cable-actuated exoskeleton. I designed and tested new BLDC motors for the actuation system and built the ball dropper mechanism.
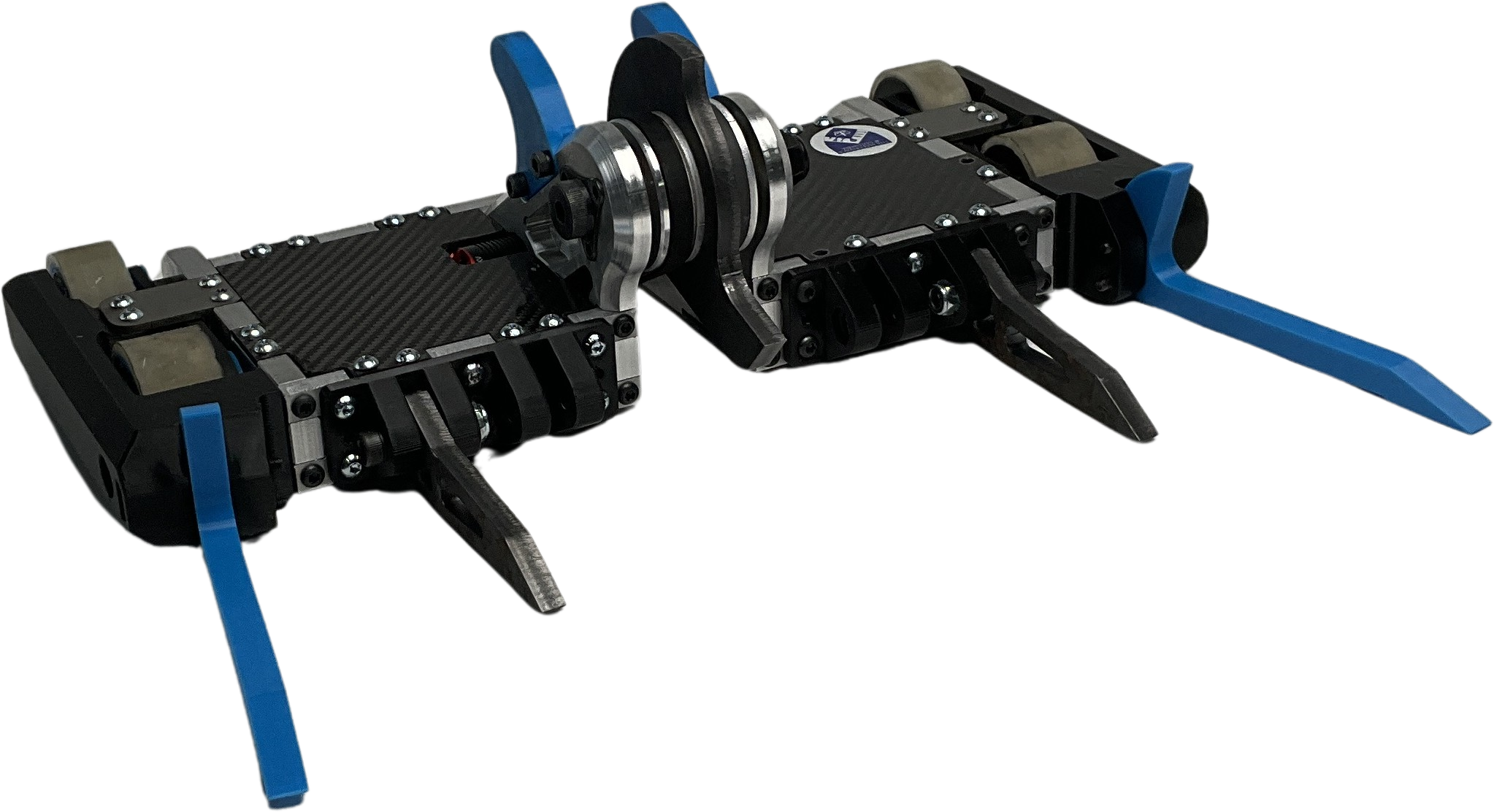
Combat Robotics
Custom combat robots designed, machined, and battled as Combat Robotics Lead of the Columbia University Robotics Club.
Full build cycle
I own the entire pipeline — CAD, CNC machining, assembly, and competition. Designed a custom all-aluminum four-wheel drivetrain and a high-speed vertical spinner, iterating between events through failure analysis.
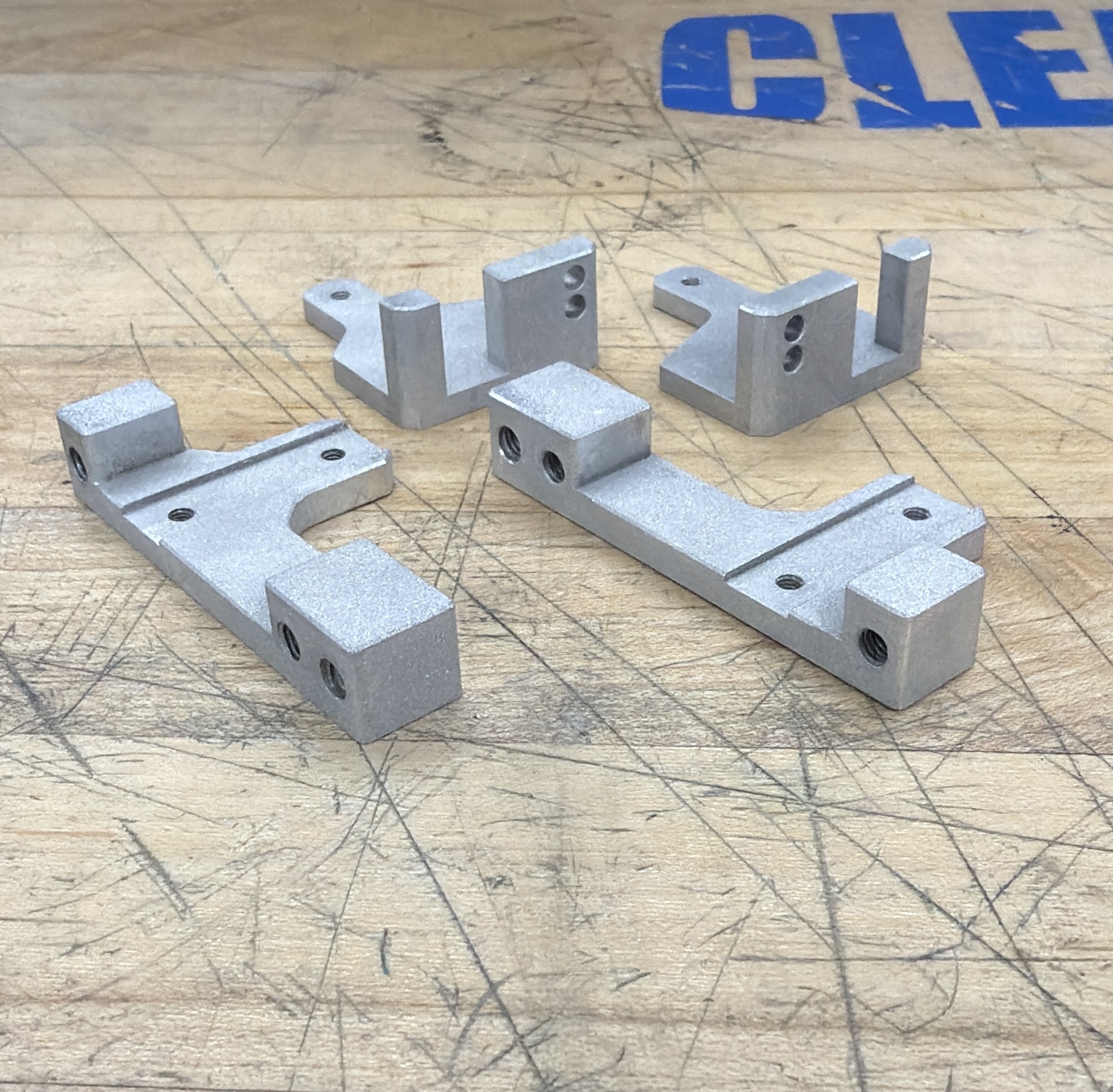
Manufacturing
Precision parts made on the Haas CNC mini mill, Haas ST20Y 4-axis lathe, and Mitsubishi Wire EDM.
More parts
From combat robot components to research hardware — designed in CAD and machined to tolerance on the shop floor.



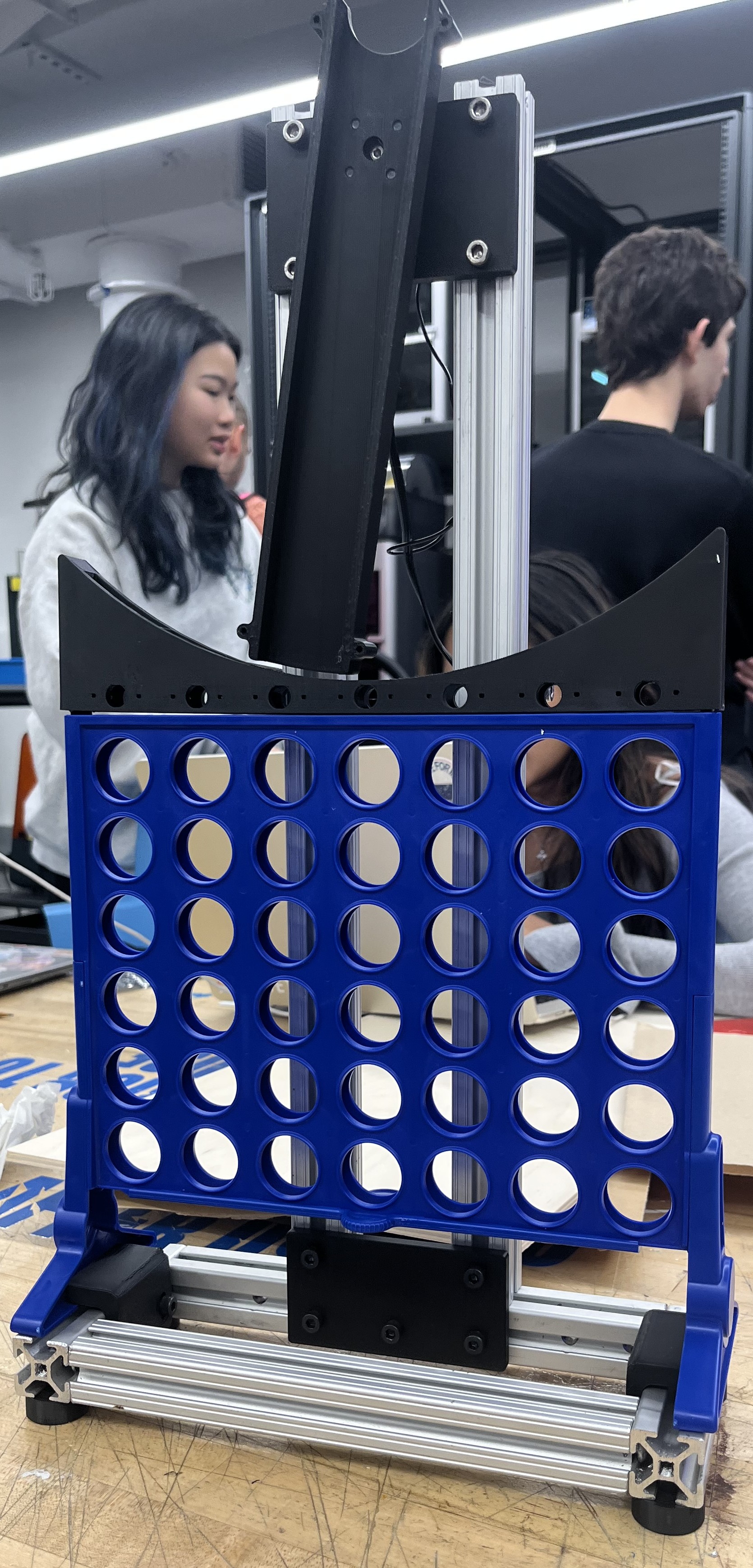
Self-Playing Connect 4
An autonomous robot that plays Connect 4 against a human — Custom python program for move selection, a solver engine, and a gantry that drops the pieces.
How it plays
Combines a minimax-style move engine, and a custom mechanical dispenser + gantry to physically place pieces against a human opponent.
github.com/Hudson-1/Connect4Robot ↗Beach Bots — FTC
Competition robot for Beach Bots, the independent FIRST Tech Challenge team I founded. Winner of the 2021 MTI competition.
Founding a team
Led CAD, manufacturing, assembly, programming, and outreach. Mentored by engineers from SpaceX, Snap, Disney Imagineering, and Unlimited Tomorrow. Also a FIRST Leadership Award Finalist — one of 165 honored worldwide.
Open Source
Customizable intake and slide systems I built and published for FIRST Tech Challenge teams — downloaded by 10,000+ users across 40 states and 10 countries.
The toolkit
Plug-and-play CAD systems for FTC drivetrains and manipulators — each documented, parametric, and free to remix. Built out of real competition needs and shared back to the community.
Let's build something.
Open to internships and collaborations in robotics, mechanism design, and precision manufacturing.